Thrust Model
The main propulsion system in Moonlander is modeled as a first-order dynamic system. The actual thrust force approaches the commanded thrust force exponentially, with a time constant representing the engine response delay.
Assumptions:
The engine cannot change its thrust force instantaneously. Instead, it behaves like a first-order system (PT1 / first-order lag) with time constant .
This model class is mathematically equivalent to:
- RC circuits
- Thermal inertia
- Motor spin-up dynamics
- Low-pass filters
Physical / System Formulation:
The rate of change of thrust force is proportional to the difference between commanded and actual thrust force:
Introducing the proportionality constant:
Interpretation:
- : commanded thrust force [N]
- : actual thrust force [N]
- : engine response time / inertia [s]
Limiting cases:
- → instantaneous response
- Large → slow engine response
Discrete Form (from ODE)
Starting from:
Assuming is constant over a timestep, the analytical solution becomes:
Rearranged:
Step-by-Step Solution of the Differential Equation
We solve the first-order ODE:
Step 1: Rearrange
Bring the equation into standard linear form:
Denote:
Step 2: Homogeneous Solution
Solve:
Using exponential ansatz:
Step 3: Particular Solution
Since the forcing term is constant, use:.
Substituting into the ODE:
Step 4: General Solution
Step 5: Apply Initial Condition
At ,:
Step 6: Evaluate at t + Δt
Expanding using:
Step 7: Intuition
- The system always converges toward.
- The convergence speed is governed by.
- Smaller → faster response.
- Larger → slower response.
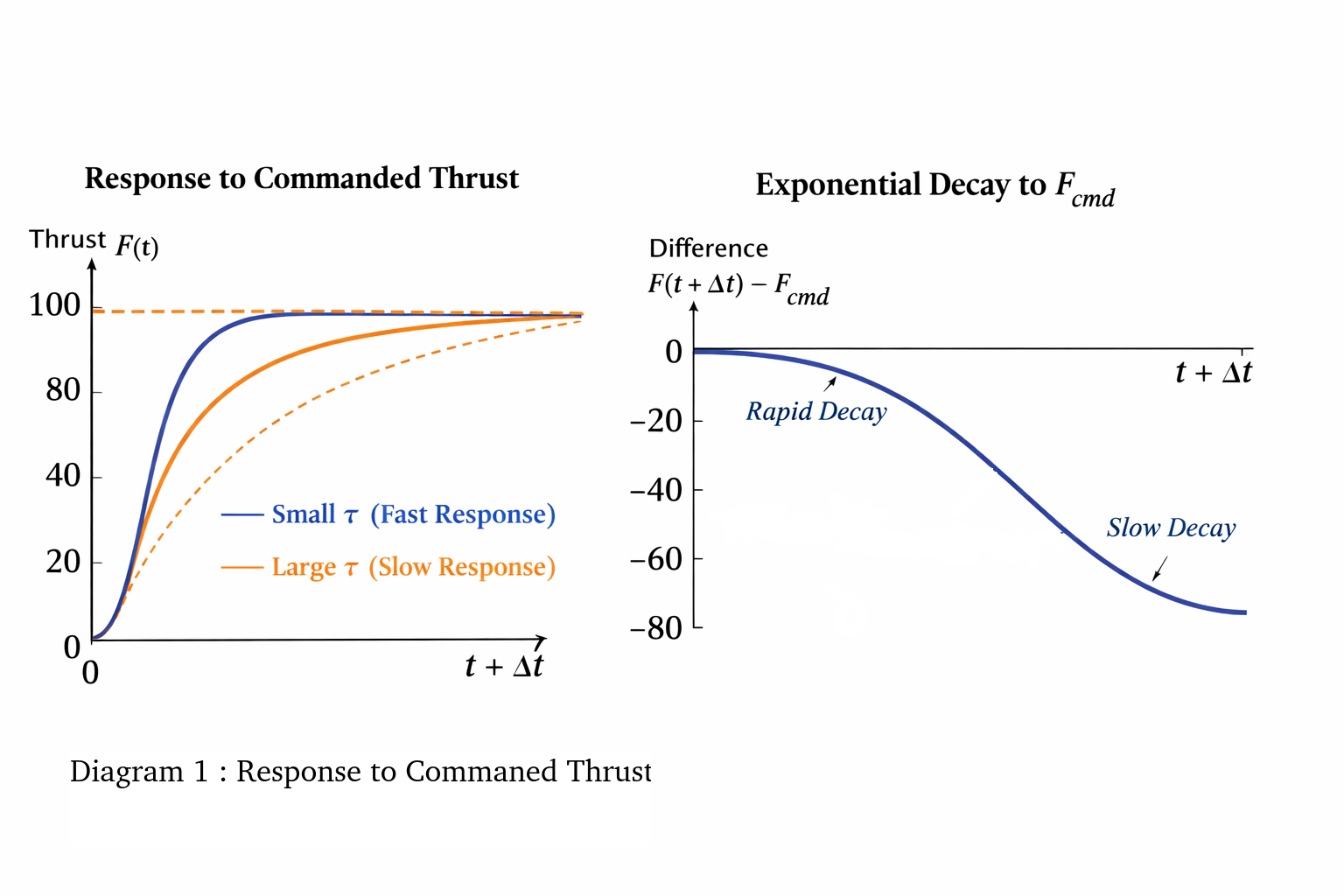
Illustration
The figure below shows the thrust force approaching the commanded target over time.
Fuel Consumption
The specific impulse is defined as:
Where:
- : specific impulse [s]
- : thrust force [N]
- : standard gravity [m/s²]
Solving for mass flow rate:
Fuel mass decreases according to:
Typical values for common propulsion systems:
| Engine Type | Fuel / Propellant | |
|---|---|---|
| Liquid Rocket | LOX/LH2 | 450–465 |
| Liquid Rocket | LOX/Kerosene | 300–350 |
| Solid Rocket | HTPB / Black Powder | 200–300 |
| Ion / Electric | Xenon, Hall / Electrostatic | 1500–4000 |
| Hybrid Rocket | HTPB + N₂O | 250–300 |
Key Characteristics
- First-order exponential response to commanded thrust force
- Stable analytical discrete-time formulation
- Real-time capable low-order propulsion model
- Physically coupled fuel consumption
- Suitable for guidance and control simulation
- Numerically stable for variable simulation timesteps